- サーモグラフィとは
サーモグラフィとは物体表面の温度を画像化する装置のことを意味します。ほとんど多くの場合、非接触式と呼ばれる測定対象物に触れることなく温度測定を行えるカメラを指します。また、 測定対象物に貼り付けてその温度分布を色むらとして見る装置をサーモグラフィと呼ぶこともあります。しかし、一般的には、サーモグラフィは測定対象物からの赤外線放射を画像化し温度換算して表示するカメラの意で使われ、サーモビジョン、サーモビューワということもあります。
また温度測定目的ではなく、夜間視認目的のものはナイトビジョン、防衛用でサーマル、TWS、(広義の)暗視装置などと称しています。
ただし、必ずこういう表現をしなければならない、と決まっているわけではありません。
- 赤外線とは
あらゆるものが電磁波を放射しています。
電磁波とは分子の振動による電場と磁場が交互に生み出す波であり、可視光線も紫外線も赤外線も電磁波です。それぞれの違いはその波長です。
赤外線は200年前にW. Hershellがプリズムでの実験で発見したとされています。分光された光の赤色の外側に熱発生が認められ、時を経てその見えない光は赤外線と名付けられました。
上述の通り、電磁波の種類の違いは波長によって分けられます。 人間が視認できるのはおおよそ0.4~0.75umの間の波長で、0.75umより長く1mm以下を赤外線としています。 近年は新しい研究分野として30um(あるいは100um)以上をテラヘルツとすることが多くなりました。1mm以上を電波として扱っています。(電波法では3テラHz=100um以上が電波の定義)
サーモグラフィは赤外線、特に中赤外線(3~5um)あるいは遠赤外線(8~14um)のいずれかを利用しています。
- サーモグラフィの測定原理
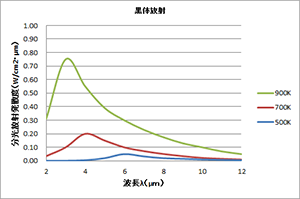
あらゆるものが赤外線を放射しています。その放射強度はその温度と放射率、波長に依存します。 サーモグラフィはその放射輝度を測定することで、温度換算しています。
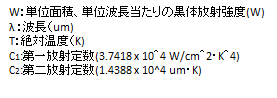
温度換算は黒体と呼ばれる理想的な赤外線放射体を模擬した黒体炉との比較により行われます。黒体と呼ばれる理想的な赤外線放射体であれば、ステファン・ボルツマンの法則を使うことで放射量と温度の関係が分かります。
しかし実際には大気による赤外光の減衰、レンズ・窓などの光学系による損失、センサ感度特性などにより計算通りには測定できないため、 黒体炉という黒体を模擬した赤外放射熱源との比較で温度測定を行います。この比較を「較正」や「キャリブレーション」などと言います。
- メリット・デメリット
サーモグラフィのメリットは、たとえば熱電対と比べると
・数万~数十万点の温度を一度に測定できる。
・触れることなく測定できる。
・温度を画像で表示、記録することができる。
デメリットは、
・測定基準が黒体(炉)であるため、測定対象の表面状態(放射率)に影響されやすい。
・周囲環境条件の影響を受けやすい(温度ドリフト、反射の影響、湿度による減衰、など。特に非冷却カメラにて)
・比較的高価
などが挙げられます。
- よく使われる用途
サーモグラフィの用途は多岐に渡ります。
歴史的に軍事目的(ウェポンサイト、FLIR、サベイランスなど)が主たる用途で温度測定よりも視認用でしたが、近年の価格低下、小型化により
・電気設備(配電盤、送電線)点検
・建築診断(断熱欠損、コンクリート浮き検知、漏水診断など)
・太陽電池パネルの不良パネル確認
・金属溶融温度など工業用プロセス温度管理
・電子基板温度分布撮影
・人体温度測定
などに使われています。
また、高感度高速タイプのものは
・ロックイン測定による太陽電池のシャント検知
・高速回転中の回転体(タイヤ・ベアリング・モーターなど)温度測定
・荷重試験による応力解析
などに使われており、
特殊なものでは
・二波長(デュアルバンド、デュアルカラー)カメラによる物体の識別
などにも使われています。
- サーモグラフィ測定上の注意点
赤外線はその温度と放射率、波長に応じて放射されます。
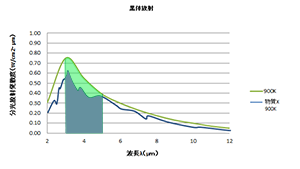
波長はサーモグラフィの光学系、センサ波長感度で規定されるので較正されたサーモグラフィであれば考慮する必要はありません。 測定上重要なのは測定対象の放射率を知ることです。同じ温度でも放射率が違えば放射される赤外線の量は違います。
またあらゆる物質は入射してくる電磁波(赤外線)に対し吸収、反射、透過のいずれかの作用をします。どのように作用するかは物質の特性によります。 温度平衡にあれば、吸収された赤外線は放射されますから、放射率に応じた放射がなされます。
問題は反射あるいは透過で、これらは測定対象の温度とは無関係です。 サーモグラフィは温度測定に関係する放射と無関係の反射あるいは透過赤外線を見分けることはできないので、すべて含んだ赤外線を測定することになり、これが誤差要因になります。
反射あるいは透過は周囲からの赤外線であり、反射率(あるいは透過率)は1-放射率で求まりますので、周囲の温度と測定対象の放射率が分かれば計算は可能です。
その他、湿度、距離、NUC、カメラ周囲温度など様々な要因が測定に影響します。
- その技術
サーモグラフィは赤外線に感度を持つセンサを搭載したデジタルカメラです。
赤外線の検知方法は主に二種類に分けられます。量子型と熱型です。
量子型とは赤外線を光子としてとらえる方式で一般的な可視のデジカメと似ています。 検知素子に化合物半導体を使用しており、InSbやMCT、QWIPなど波長特性のあるセンサを使います。 また熱励起により室温では使用できないため、通常-196℃に冷却します。そのため冷却型とも言います。
特徴としては短時間の露光、高いフレームレート、高感度を得ることができ、波長も近赤外から遠赤外まで選択できます。 2波長などのマルチバンドセンサも存在します。 またクーラーで極低温に安定させているため、熱型に比べ大変安定しています。しかしクーラー搭載ゆえに大型で重く、クーラーのメンテナンスが必要で、熱型に比べ高価です。
熱型とは赤外線を熱線としてとらえる方式で、検知素子が赤外線を受光した際の温度上昇(あるいは低下)を電気的な変化に変えて信号としています。 温度変化を起電力に変えるSOIやサーモパイル型や極性変化を見る焦電型もありますが、温度変化を抵抗値変化としてみるボロメータ型が主流です。 酸化バナジウムとアモルファスシリコンの2種があります。変化をとらえるので室温動作し、クーラーを使用しないですむため非冷却型とも言います(動作安定のためにペルチエ素子を使っています)。
特徴としてはクーラー不要であるためメンテナンスが不要。小型で冷却型に比べ安価です。解像度も冷却型に追いつきつつあります。また広い範囲に感度波長をとれます。 デメリットは冷却型に比べ感度が低く、応答速度は熱型であるため遅く、3桁以上落ちます。
レンズは赤外域を透過する材料を使用し、Ge、Si、ZnS、ZnSe、カルコゲナイドガラスなどが使われますが最も多く使われるのはGe(ゲルマニウム)です。 ガラス(SiO2)は3um程で透過率が落ちていくのでサーモグラフィで通常使用する波長域では使用できません。
- 独特の性能表示
・NETD ・・・Noise Equivalent Temperature Differenceの略で雑音等価温度差です。 最小温度分解能、温度分解能、感度などメーカーによって表記が違います。 その検知素子がどれだけ細かい温度差を見分けることができるかを表し、評価は2点温度を測定し信号と雑音の比で割った値を雑音に等しい温度としています。
・測定精度 ・・・サーモグラフィの測定精度は黒体炉の表示温度に対する精度になります。そのため較正条件が重要になります。
- サーモグラフィの特徴
- 熱分布の取得
- 温度計測
- 測定条件、精度、再現性
- カメラグレード、補正
- 温度計測と温度分解能
- 放射率とは
- 黒体と黒体放射とは

- 物質が黒体放射するならば・・・
- 放射率

- 赤外線入射時の物質の振る舞い
- 吸収と放射:キルヒホッフの法則
- 反射、透過、放射
- 測定したいのは放射のみ
- サーモグラフィの信号とドリフト
- ドリフト
- サーモグラフィのドリフトにはいくつかの要因があります。
- 再現性
- ドリフト
- 環境温度の変化
- NUC
- グレードと対策
- NETDとは
- 定義
- パラメータ
- 計測・用途
- 赤外線の検知方式の1つで、冷却しないと感度の得られないセンサ(カメラ)を指します。
- 冷却方式
- 冷却構造
- 特徴
- 感度
- 信号安定性・再現性
- 波長特性
- デメリット